
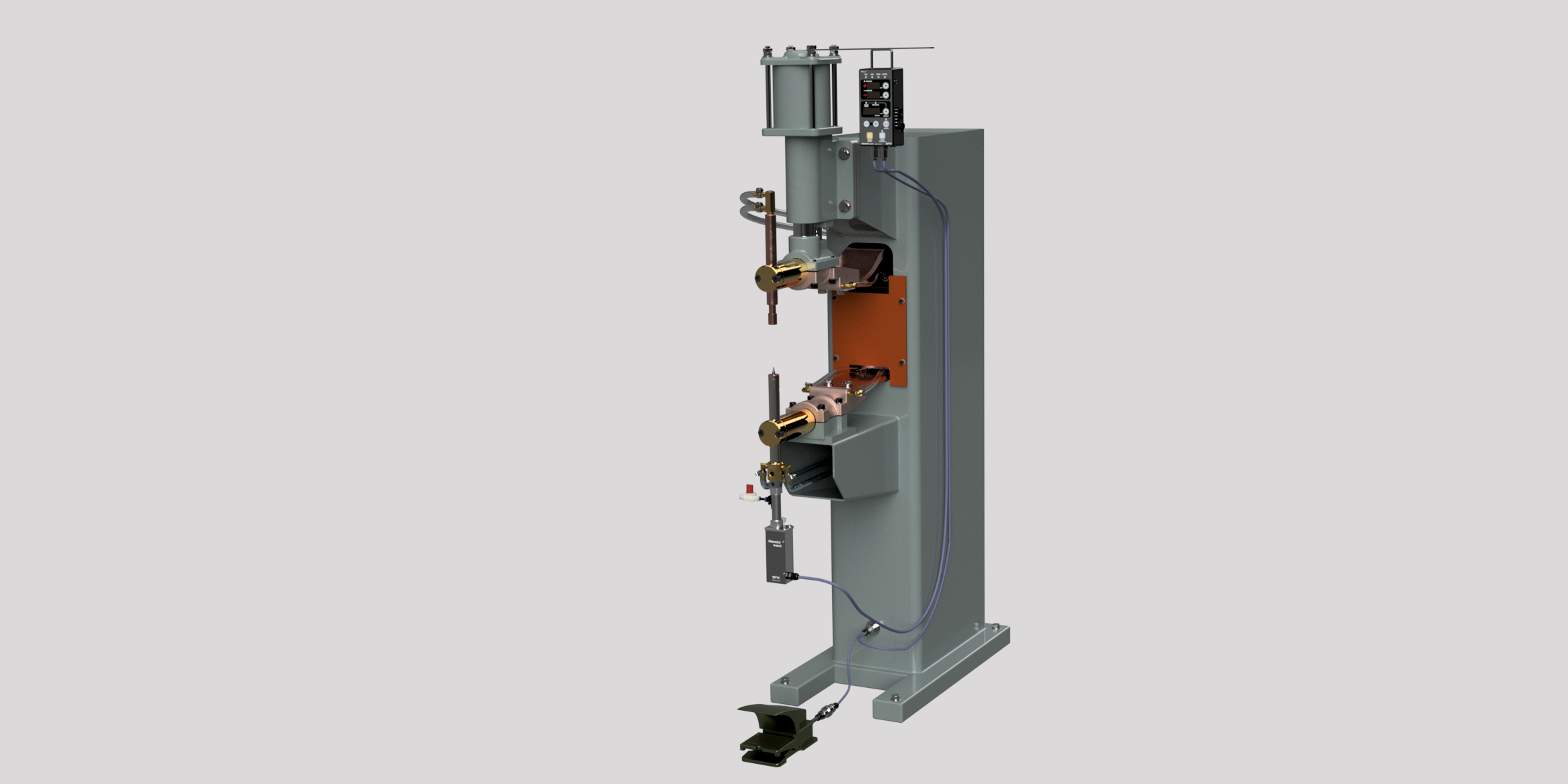
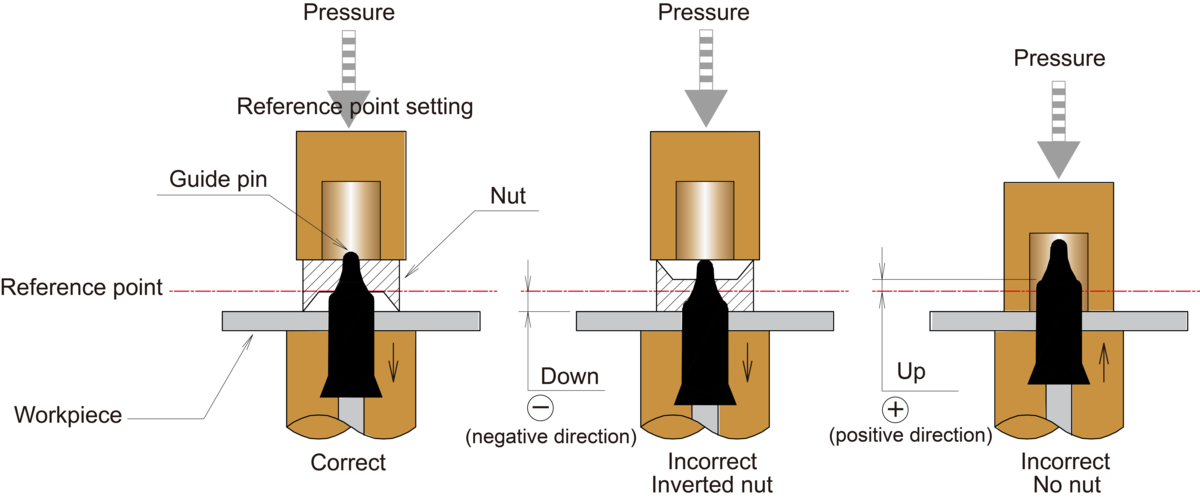
Examples of incrrect Nut Setting
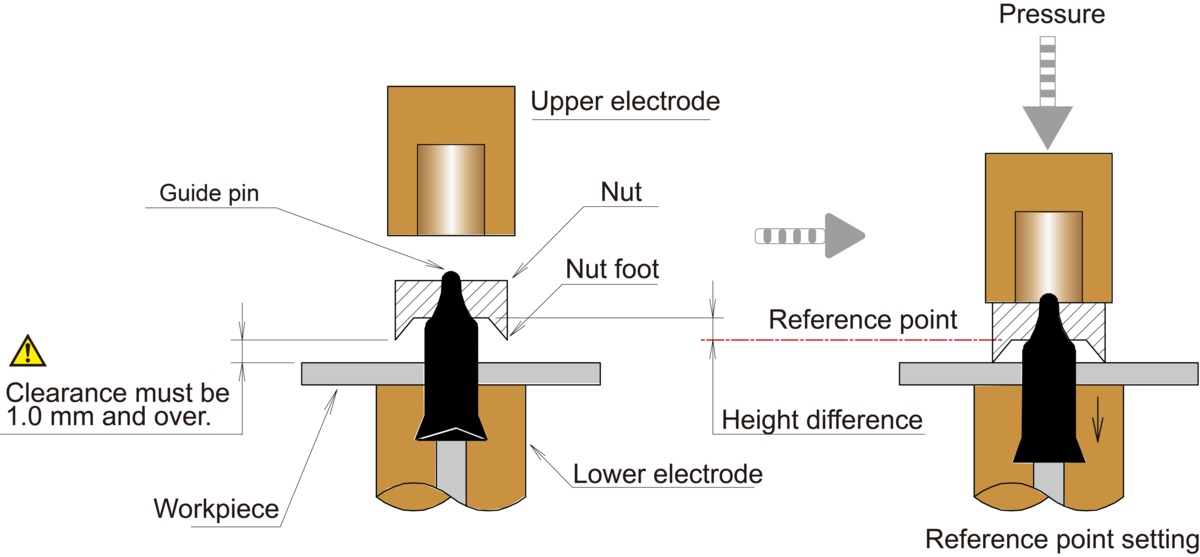
Method of Nut Detection
When pressured, the guide pin is pressed by the upper electrode to descend.
This height difference determines whether the nut is set correctly or not.
How to Detect Incorrect Nut Setting
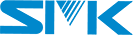
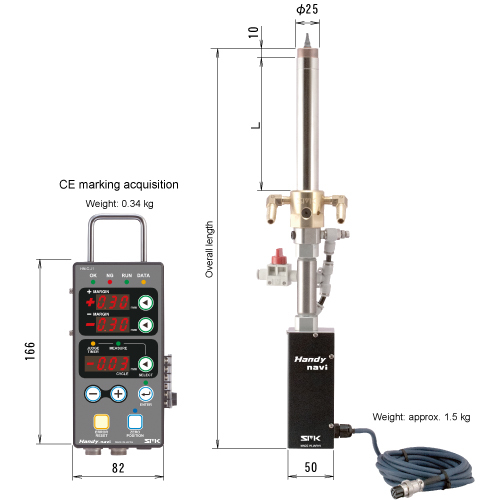
Handy-navi
Suitable for manual operation.
Workpieces are set manually. Suitable for operations feeding nuts manually or by nut feeder.
Φ32 holder = Nut size (M10.M12.7/16)
Overrall length=(425㎜.475㎜.525㎜)
L=(140㎜.190㎜.240㎜)
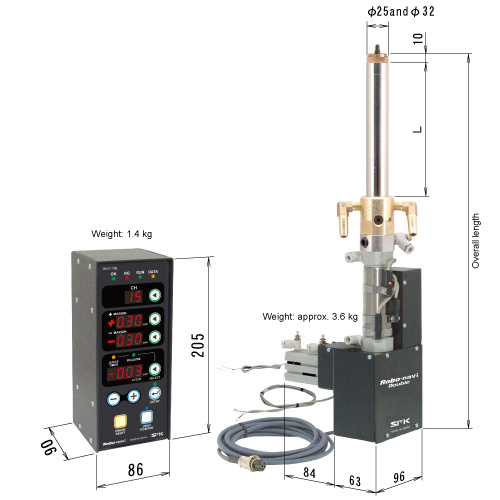
Robo-navi-single
Suitable for robots and automated machinery.
Suitable for fully automated welding system which uses controlling function and robot for workpiece setting, nut feeding, product-type switchover, changing weld conditions, etc.
Φ32 holder = Nut size (M10.M12.7/16)
Overrall length=(425㎜.475㎜.525㎜)
L=(140㎜.190㎜.240㎜)

Robo-navi-Double
Suitable for robots and automated machinery.
Suitable for fully automated welding system which uses controlling function and robot for workpiece setting, nut feeding, product-type switchover, changing weld conditions, etc.
Φ32 holder = Nut size (M10.M12.7/16)
Overrall length=(423㎜.473㎜.523㎜)
L=(140㎜.190㎜.240㎜)